Publication
— 2023 —
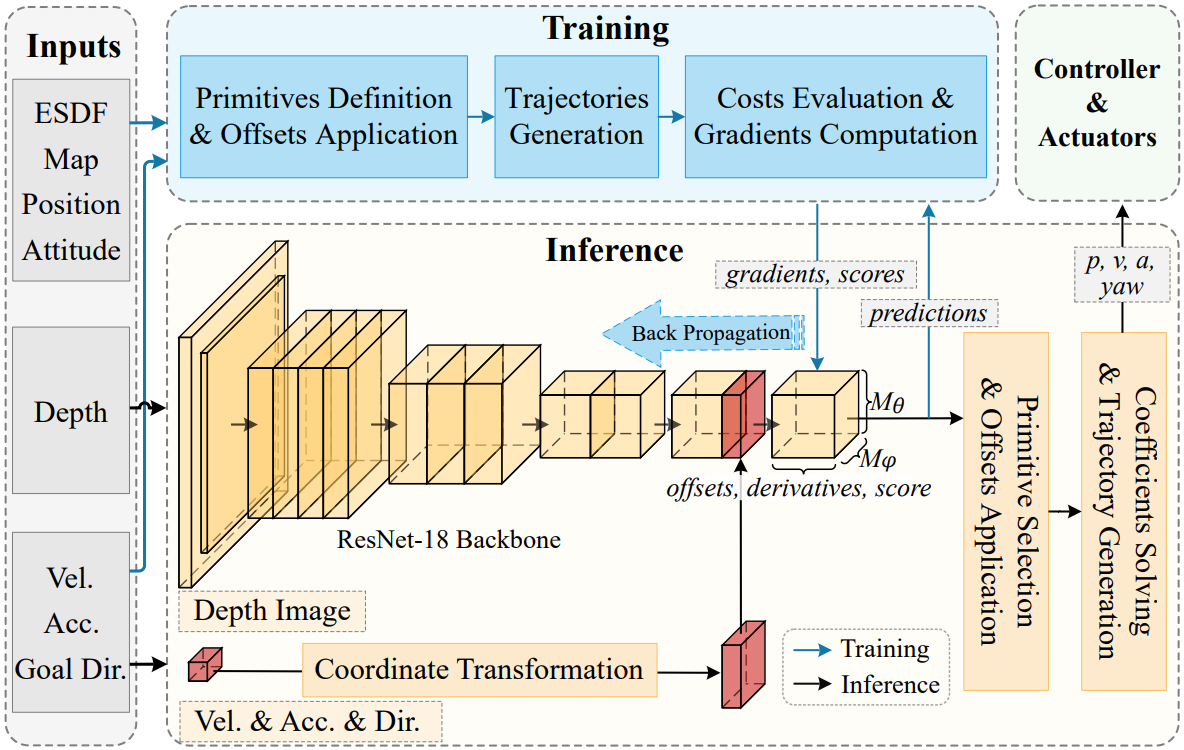 |
You Only Plan Once: A Learning-based One-stage Planner with Guidance Learning Junjie Lu, Xuewei Zhang, Hongming Shen, Liwen Xu, and Bailing Tian the School of Electrical and Information Egineering Tianjin University [Project page] [Paper] |
 |
Synthesizing Physical Character-Scene Interactions Mohamed Hassan, Yunrong Guo, Tingwu Wang, Michael Black, Sanja Fidler, Xue Bin Peng ACM SIGGRAPH 2023 [Project page] [Paper] |
— 2022 —
 |
Unsupervised Reinforcement Learning with Contrastive Intrinsic Control Michael Laskin, Hao Liu, Xue Bin Peng, Denis Yarats, Aravind Rajeswaran, Pieter Abbeel Neural Information Processing Systems (NeurIPS 2022) [Project page] [Paper] |
Thesis
 |
Ph.D. Thesis Acquiring Motor Skills Through Motion Imitation and Reinforcement Learning University of California, Berkeley 2021 [Project page] [Thesis] |
 |
M.Sc. Thesis Developing Locomotion Skills with Deep Reinforcement Learning University of British Columbia 2017 [Project page] [Thesis] |