Research
You Only Plan Once: A Learning-based One-stage Planner with Guidance Learning
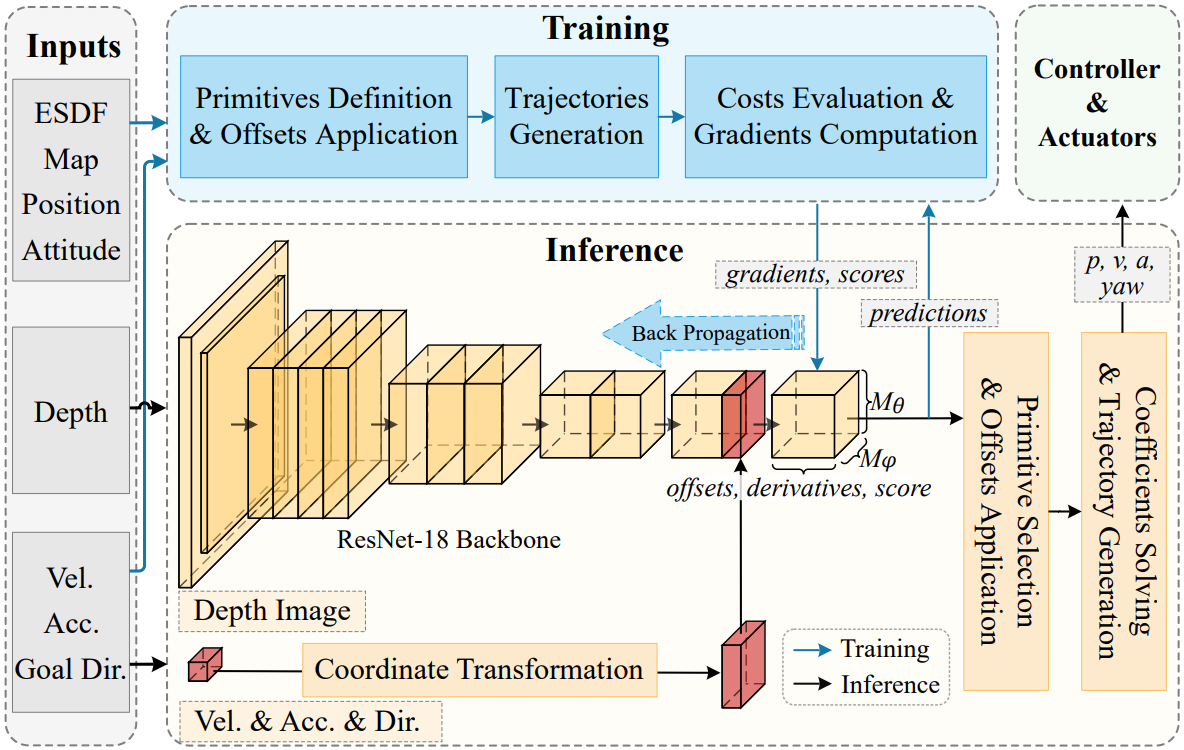
In this work, we propose a learning-based one-stage planner for trajectory generation of quadrotor in obstacle-cluttered environment without relying on explicit map. Weintegrate perception and mapping, front-end path searching, and back-end optimization into a single network. We frame the motion planning problem as a regression of spatially separated polynomial trajectories and associated scores. Specifically, our approach adopts a set of motion primitives to cover the searching space, and predicts the offsets and scores of primitives for local optimization in a single forward propagation. A novel unsupervised learning strategy, termed guidance learning, is developed to provide numerical gradients as the guidance for training. We train the network policy with privileged information about the surroundings while only the noisy depth observations are available during inference. Finally, a series of experiments are conducted to demonstrate the effectiveness and time-efficiency of the proposed method in both simulation and real-world. For supplementary video see: https://youtu.be/GoqZM3TxDbM The code will be released at .https://github.com/TJU-Aerial-Robotics/YOPO.